Intelligente Werkzeugöffnungssteuerung
2022-11-15
Einleitung:
Dieses Steuerungsschema baut den Daten- und Positionssignal-Übertragungsweg zwischen der Steuerung und dem Servoantrieb über den CANopen-Bus auf und fügt den Algorithmus und das Programm für die Positionsregelung im Antrieb hinzu, um so eine präzise Positionierung der Werkzeugöffnung zu realisieren. Durch den Einsatz intelligenter Algorithmen wird die Schwierigkeit der Einstellung der Öffnungsparameter deutlich verringert.
Mehr Nachrichten
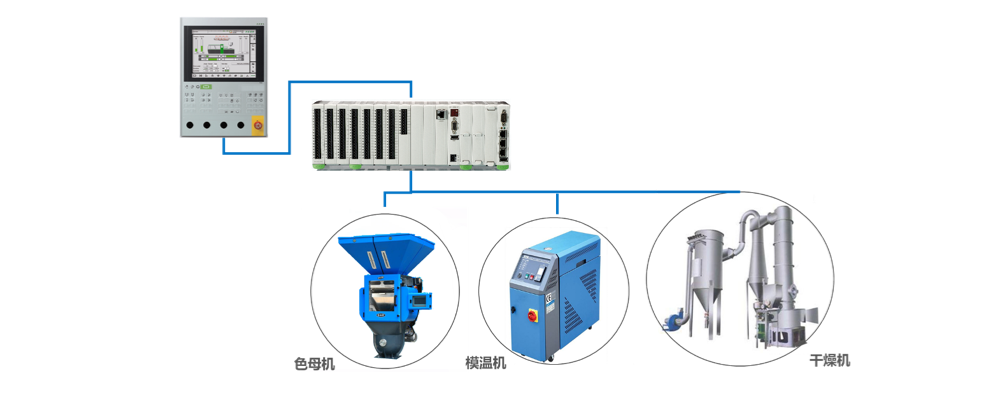
Integrationslösungen für Hilfsausrüstung
2022-11-15
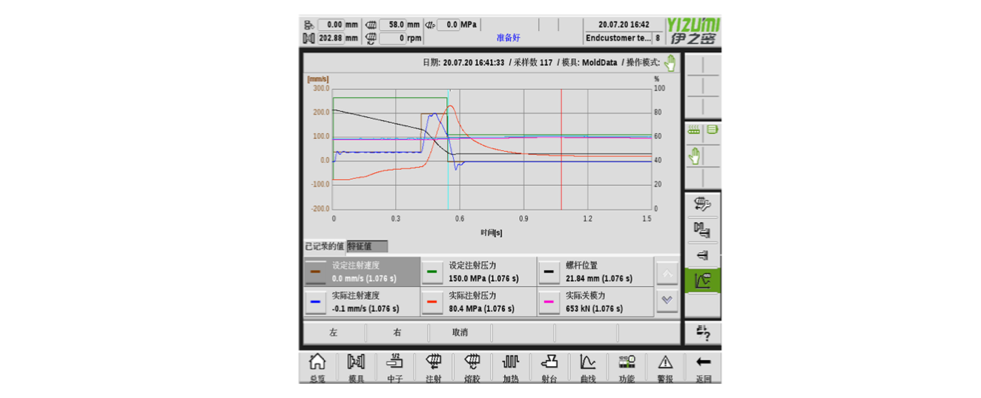
Vollelektrisches Halten der Einspritzposition der Maschine
2022-11-15
Intelligente Werkzeugtemperatursteuerung
2022-11-15
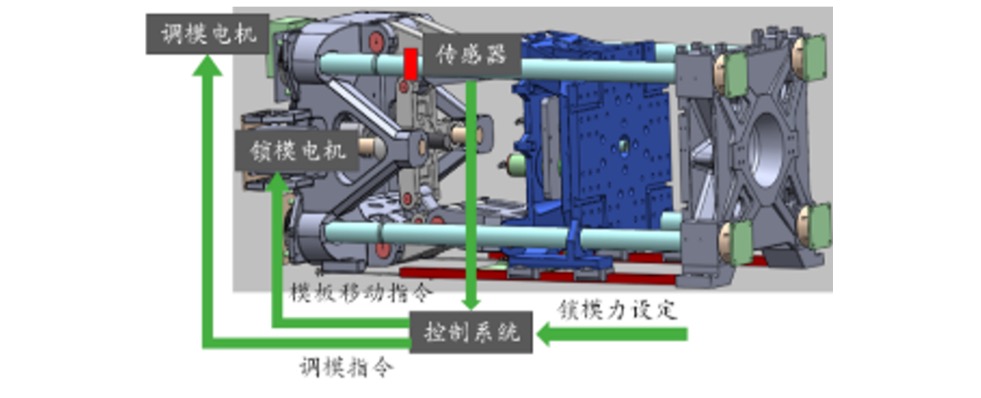
Intelligentes Klemmkraft-Steuersystem
2022-11-15
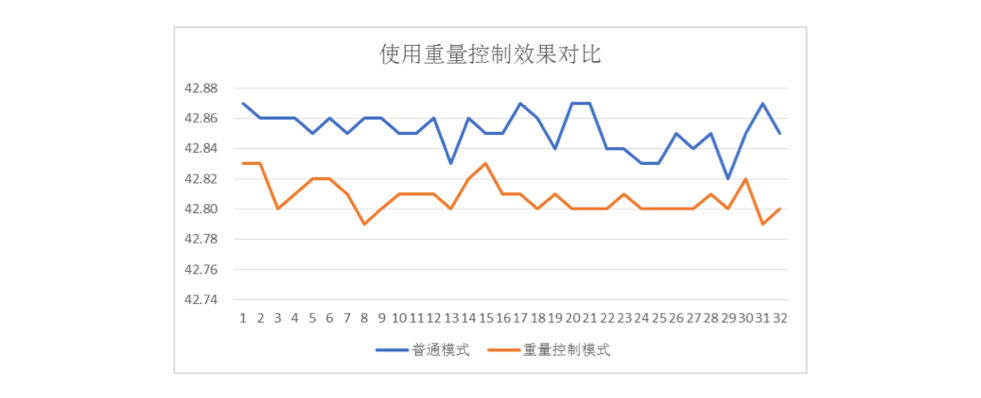
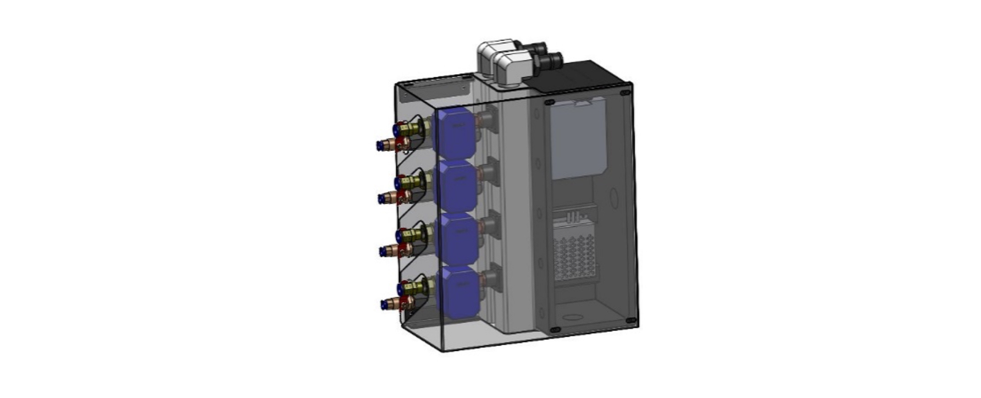
Intelligentes Schussgewicht-Steuersystem
2022-11-15

Kontaktaufnahme
Bitte hinterlassen Sie Ihre Nachricht und wir setzen uns schnellstmöglich mit Ihnen in Verbindung!
Ich stimme zu, dass meine persönlichen Daten von YIZUMI im Zusammenhang mit meiner Anfrage erhoben und verarbeitet werden.