Intelligent Mold Opening Control
2022-11-15
Abstract:
This control scheme builds the data and position signal transmission path between the controller and the servo drive through the CANopen bus and adds the algorithm and program for the closed-loop position control in the drive to realize the precise positioning of the mold opening. The use of intelligent algorithms greatly reduces the difficulty of mold-opening parameter settings.
More News
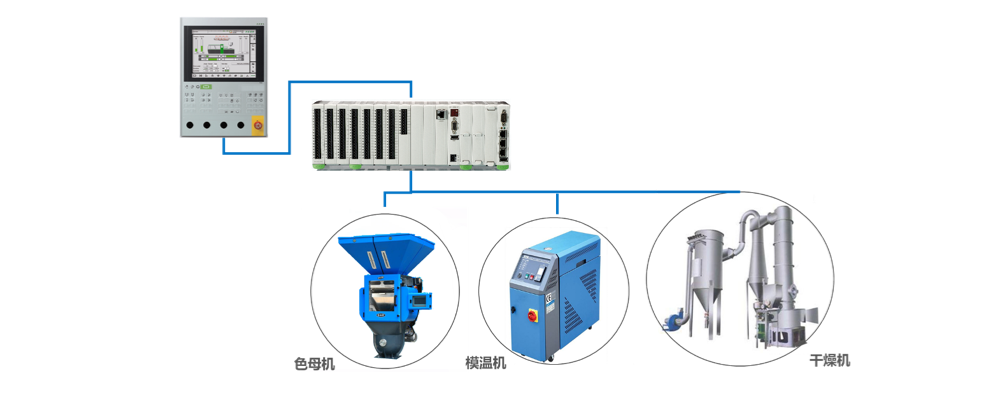
Integration solutions for auxiliary equipment
2022-12-05
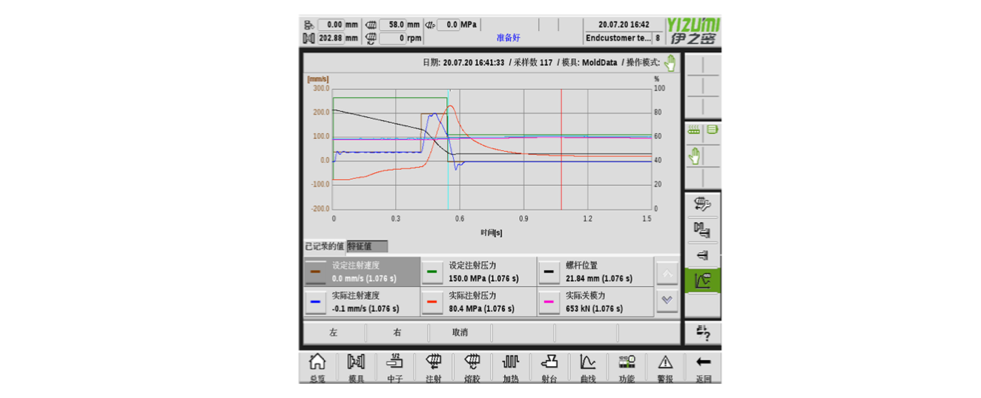
All-electric machine injection position holding
2022-12-05
Intelligent Mold Temperature Control
2022-11-15
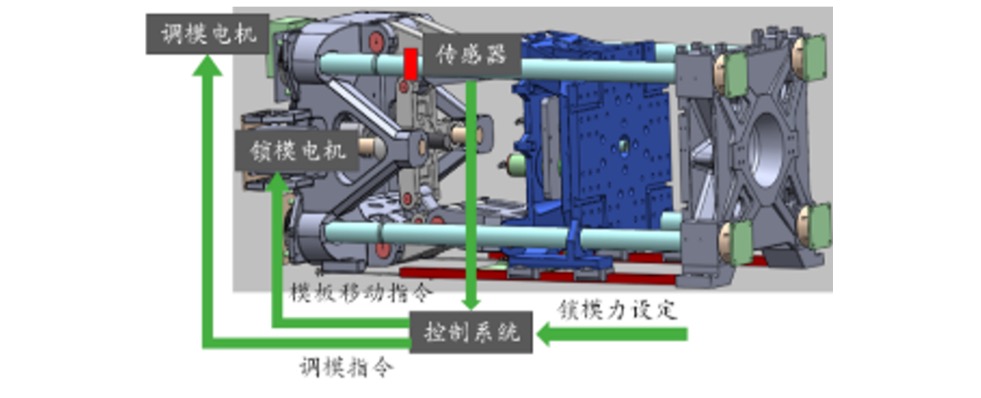
Intelligent Clamping Force Control System
2022-11-15
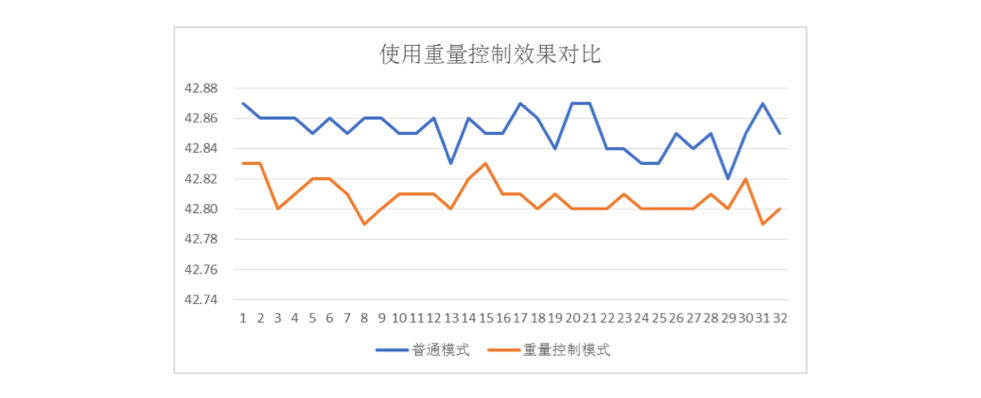
Intelligent Shot Weight Control System
2022-11-15

Contact Us
Please leave your message, and we will contact you soon!
I hereby give my consent for my personal data, collected and processed by YIZUMI in relation to my inquiry.